上海四宏電機有限公司主營產品:低壓伺服電機、交流伺服電機、步進電機、無刷電機以及配套驅動器。
南方大區:13482896782
北方大區:18017377875
廣東大區:13061929082
北方大區:18017377875
廣東大區:13061929082
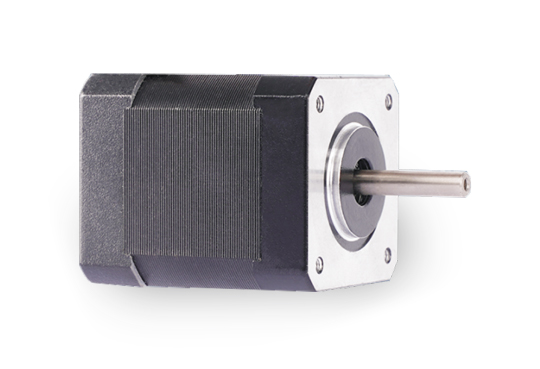
一般二相電機的步距角為O.go/1.80、三相的為0 75。門5。、五相的為0 36。/0.72。。在沒有細分驅動器時,用戶主要靠選擇不刊相數的步進電機來滿足自已步距角的堅求。如果使用細分驅動器,則‘相數’將變得沒有意義,用戶只需在驅動器上改變細分數,就--J以改變步距角。保持轉矩是指步進電機通電但沒有轉動時,定了鎖住轉了的力矩。它是步進電機最重要的參數之,通常步進電機在低速時的力矩接近保持轉矩。由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉矩就成為了衡量步進電機最再要的參數之。比如,當人們說2N.m 的步進電機,在沒有特殊說明的情況下是指保持轉矩為2N.m的步進電機。由十反應式步進電機的轉子不足水磁材料,所以它沒有DETENT TOROUE:(是指步進電機沒有通電的情況下,定了鎖住轉了的力矩)或者叫磁阻力矩步進電動機和步進電動機的區別步進電機是一種離散運動的裝置,它和現代數字控制技術有著本質的聯系。在目前國內的數字控制系統中,步進電機的應用十分廣泛。隨著全數字式交流步進系統的出現,交流步進電機也越來越多地應用于數字控制系統中。為了適應數字控制的發展趨勢,運動控制系統中大多采用步進電機或全數字式交流步進電機作為執行電動機。雖然兩者在控制方式上相似(脈沖信號和方向信號),但在使用性能和壓用場合上存在著較大的差異。現就二者的使用性能作一比較。